How to Build a Wildlife Camera Trap with OpenClaw on Raspberry Pi
A wildlife camera trap agent uses an OpenClaw-powered Raspberry Pi with a PIR motion sensor and camera module to autonomously photograph animals, classify species with edge AI, and sync captures to the cloud. This guide covers hardware selection, sensor wiring, OpenClaw agent configuration, species classification models, and cloud storage so your camera trap runs unattended in the field.

Why Standard Camera Traps Fall Short
Commercial trail cameras capture thousands of images per deployment. The problem is what happens after. You pull the SD card, plug it into a laptop, and scroll through hundreds of blank frames, swaying branches, and the occasional deer flank disappearing from view. The camera did its job. The sorting, identification, and cataloging still fall on you.
Raspberry Pi camera trap projects improve on the hardware side. They are cheaper than commercial trail cameras, fully customizable, and open source. But most guides stop at "capture a photo when the PIR sensor fires." You still get a folder of unlabeled JPEGs with no species information, no filtering, and no way to query the data without opening every file.
OpenClaw changes the equation by adding an agent decision layer. Instead of a passive capture device, the Pi becomes an autonomous agent that detects motion, photographs the animal, runs a classification model to identify the species, filters out false triggers like wind and rain, and pushes confirmed wildlife sightings to cloud storage. The agent handles the entire pipeline from sensor input to labeled, searchable archive.
The hardware has reached the point where this is practical. The Raspberry Pi Camera Module 3 captures 12-megapixel stills with phase-detection autofocus. PIR sensors like the HC-SR501 detect warm-bodied animals up to 7 meters away. The Pi 5 runs lightweight classification models fast enough for real-time processing. And OpenClaw ties all of it together with an agent loop that runs unattended for weeks.
This guide walks through every step: choosing and wiring the hardware, installing OpenClaw, configuring motion-triggered capture, running species classification, and syncing results to cloud storage where the data becomes searchable and shareable.
What to check before scaling openclaw raspberry pi wildlife camera trap agent
The parts list stays short and the total cost sits between $90 and $150 depending on what you already own.
Core components:
- Raspberry Pi 5 (8 GB RAM) for comfortable AI inference, or Raspberry Pi 4 (4 GB minimum)
- Raspberry Pi Camera Module 3 (12 MP, Sony IMX708 sensor, phase-detection autofocus)
- HC-SR501 PIR motion sensor (adjustable detection range from 3 to 7 meters)
- High-endurance microSD card, 32 GB or larger
- Weatherproof enclosure rated for outdoor use
- USB-C power supply rated at 5V/5A for Pi 5, or 5V/3A for Pi 4
Optional additions:
- Camera Module 3 NoIR variant with IR LED array for night capture
- Hailo-8L AI HAT for hardware-accelerated inference at 13 TOPS
- Solar panel (20W minimum) with USB power bank for remote deployments
- UPS HAT like PiSugar 3 for clean shutdown during power interruptions
- External USB SSD for longer deployments where microSD wear is a concern
Camera selection:
The Camera Module 3 is the right choice for wildlife traps. Its autofocus system uses phase detection (PDAF) as the primary method and falls back to contrast detection (CDAF) when needed. Animals trigger the trap at varying distances, and fixed-focus cameras produce blurry shots unless the subject sits at exactly the preset focal distance. The Module 3 adjusts focus continuously, keeping subjects sharp from 5 cm to infinity.
The standard Module 3 has a 66-degree horizontal field of view, which works well when the camera is aimed at a trail, water source, or feeding station. The wide-angle variant (102-degree FoV) covers more ground but introduces barrel distortion at the edges, which can reduce classification accuracy for animals at the periphery. For most wildlife trap placements, the standard lens produces better results.
For night operation, the NoIR variant removes the infrared cut filter. Pair it with an 850nm IR LED array and the camera captures usable images in complete darkness without a visible flash that spooks animals. The trade-off is that daytime images have a reddish color cast, which affects species identification for color-dependent species. If you need both day and night accuracy, two cameras (standard for day, NoIR for night) with a light-sensor switch is the most reliable approach.
PIR sensor wiring:
The HC-SR501 PIR sensor connects to the Pi with three wires. VCC goes to a 5V GPIO pin, GND to a ground pin, and OUT to a GPIO input pin (GPIO 17 is a common choice). The sensor outputs 3.3V on the OUT pin when it detects motion, which the Pi reads directly without a level shifter.
Adjust the two potentiometers on the HC-SR501 before deployment. The sensitivity pot controls detection range from 3 to 7 meters. Start at the midpoint (about 5 meters) and adjust based on your trail width and expected animal distance. The time delay pot controls how long the output stays high after a detection, from 3 seconds to about 5 minutes. Set it to the minimum (3 seconds) so the agent controls the capture timing, not the sensor.
Mount the PIR sensor with a clear line of sight to the target area. Avoid pointing it toward direct sunlight, heat sources, or surfaces that change temperature rapidly (like sun-heated rocks), as these cause false triggers. A small sun shield or recessed mounting helps in locations with partial sun exposure.
Installing OpenClaw and Configuring the Agent
Start with a fresh Raspberry Pi OS (64-bit) install. Use the Raspberry Pi Imager to flash the OS to your microSD card, enable SSH, and configure Wi-Fi so you can set up the Pi headlessly from another machine.
OpenClaw installs with a single command on an updated Pi OS:
curl -fsSL https://openclaw.ai/install.sh | bash
This pulls in the OpenClaw runtime and its dependencies. On a Pi 5 with 8 GB RAM, the install completes in a few minutes. On a Pi 4 with 4 GB, expect it to take longer as swap usage increases during compilation steps.
OpenClaw works as a persistent agent that monitors inputs, makes decisions, and takes actions. For a camera trap, the agent loop follows this sequence: wait for PIR trigger, capture image, run classifier, evaluate confidence, log or discard, and repeat. The agent handles all of this autonomously once configured.
OpenClaw supports multiple LLM backends including local models through Ollama and remote APIs. For a field deployment where internet may be intermittent, running a local model keeps the agent functional without connectivity. The LLM handles the decision-making layer: interpreting sensor data, deciding whether a capture is worth classifying, generating log entries, and managing error recovery. The classification model itself is a separate, dedicated ML model optimized for speed.
Configuring the capture pipeline:
The agent needs to know which GPIO pin the PIR sensor uses, where to save captured images, how many frames to capture per trigger event, and where to send classification results. A typical workflow:
- PIR sensor fires on GPIO 17
- Agent captures a burst of 3 to 5 frames spaced 500 ms apart
- Agent selects the sharpest frame (highest Laplacian variance score)
- Best frame goes to the classification model
- If confidence exceeds threshold (0.7 is a reasonable starting point), log the sighting
- If confidence is below threshold, save the image in a review queue for manual checking
- Upload confirmed sightings to cloud storage on a schedule
This burst-and-select approach avoids wasting classification cycles on blurry frames. Animals are often mid-stride when the PIR fires, and the first frame is rarely the sharpest. Capturing a short burst and picking the best frame improves classification accuracy.


Give Your Camera Trap a Cloud Archive
Fastio provides 50 GB of free cloud storage with built-in AI indexing. Upload wildlife sightings from your OpenClaw agent, search your archive by species or date, and share results with researchers, all with no credit card required. Built for openclaw raspberry wildlife camera trap agent workflows.
Species Classification on the Edge
The classification model is what turns a motion-triggered camera into an actual wildlife monitoring tool. Two practical approaches work well on Pi hardware.
Image classification with TensorFlow Lite:
TensorFlow Lite runs efficiently on ARM processors. A MobileNetV2 model trained on wildlife species processes a single frame in roughly 100 to 200 ms on a Pi 5, which translates to 5 to 10 frames per second for continuous processing. For a camera trap that classifies one best frame per trigger event, this speed is more than sufficient.
Pre-trained wildlife models exist, but most are trained on specific regional species sets. For broad wildlife monitoring, iNaturalist community models cover thousands of plant and animal species. For mammals specifically, models trained on datasets from camera trap networks like Snapshot Serengeti or Wildlife Insights provide strong baseline accuracy for common species like deer, foxes, raccoons, and coyotes.
If pre-trained models do not cover your target species well, transfer learning on a MobileNetV2 backbone using your own labeled images produces a capable classifier with as few as 50 to 100 images per species. Google's Teachable Machine or TensorFlow's transfer learning tutorials walk through this process.
Adding a Hailo accelerator:
The Hailo-8L AI HAT plugs into the Pi 5's PCIe slot and provides 13 TOPS of dedicated inference power. With the Hailo handling classification, the Pi's CPU stays free for the agent loop, image capture, and upload tasks. Inference drops below 50 ms per frame, which matters if you want to classify every frame in a burst rather than just the sharpest one.
False positive filtering:
Raw PIR triggers include wind-blown vegetation, rain, passing vehicles (if near a road), and temperature fluctuations. The classification model acts as the first filter: if the model returns no animal class above the confidence threshold, the agent discards the capture. A second filter checks for consecutive triggers with identical or similar frames, which usually indicates a stationary heat source rather than an animal passing through.
The OpenClaw agent manages this filtering logic. When a trigger fires and classification returns nothing useful, the agent logs a brief "no detection" entry with the timestamp and skips the upload. Over time, the ratio of confirmed sightings to total triggers tells you how well your PIR placement and sensitivity settings are working. Ratios below 10% confirmed suggest the sensor needs repositioning or desensitization.
What the classification output looks like:
Each successful detection produces a record: species name, confidence score (0 to 1), timestamp, image filename, and optionally the raw classification output showing the top 5 predicted classes. This structured data feeds directly into the sighting log and makes the archive queryable.
Syncing Captures to Cloud Storage
A camera trap on a microSD card in the woods is one stolen SD card or one corrupt write away from losing weeks of data. Syncing captures to cloud storage protects the archive and makes the data accessible from anywhere.
Local storage options first:
Local options work for short deployments. The Pi writes images and sighting logs to the microSD card or an attached USB SSD. You visit the trap, pull the data, and process it at home. This is fine for a backyard setup, but impractical for remote deployments where you want to monitor results without physically visiting the trap.
For cloud sync, several approaches work:
- S3-compatible storage with rclone handles bulk uploads and is widely supported
- Google Drive works for personal projects but has API rate limits that complicate automated uploads
- Fastio adds an intelligence layer on top of storage that makes the archive searchable and queryable
Fastio is purpose-built for this kind of agent-to-cloud workflow. The OpenClaw agent uploads sighting images and log data to a Fastio workspace using the MCP server at /mcp, which provides programmatic access to workspace operations including file upload, folder management, and metadata. The Business Trial includes 50 GB of storage, 5,000 monthly API credits, and 5 workspaces, with no credit card required and no expiration.
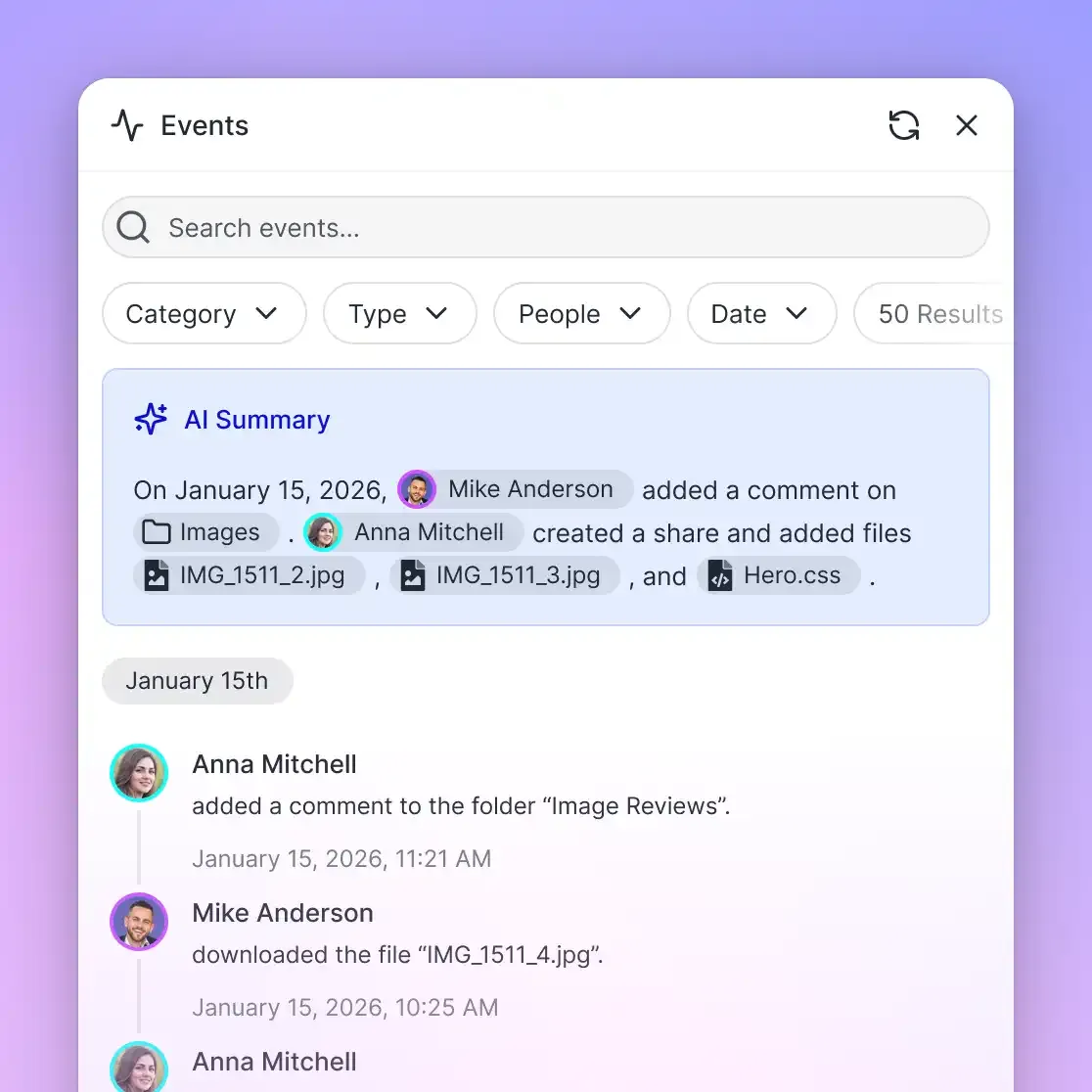
What makes Fastio particularly useful for wildlife data is Intelligence Mode. Enable it on the workspace and uploaded files are automatically indexed for semantic search. Instead of browsing folders of timestamped images, you can ask questions: "show me all fox sightings from last week" or "when was the last nighttime deer detection?" Intelligence Mode returns answers with citations pointing to the specific images and log entries.
The agent should batch uploads rather than pushing every image immediately. A reasonable schedule is every 15 to 30 minutes when connected, or immediately for high-confidence detections of rare or notable species. Queue uploads locally when Wi-Fi is unavailable, then sync the backlog when connectivity returns. Fastio's upload API handles interrupted transfers, so a dropped connection during a batch upload resumes where it left off rather than starting over.
For sharing results with researchers, conservation groups, or fellow wildlife enthusiasts, Fastio's branded sharing creates a clean link to the sighting archive. Recipients browse the images and data through a web interface without needing their own account. Password-protect the share if the location data is sensitive, which it often is for rare or protected species.
If you are running multiple camera traps across different locations, each Pi uploads to the same Fastio workspace in separate folders. Intelligence Mode indexes across all locations, so cross-site queries like "which location has the most raccoon activity" work automatically.
Field Deployment and Long-Term Maintenance
A wildlife camera trap is an outdoor computer running unattended for weeks or months. The hardware and software both need planning for reliability.
Power management:
A wired power supply is the most reliable option for traps near buildings or outposts. For remote locations, a 20W solar panel paired with a 20,000 mAh USB power bank sustains a Pi 5 through most conditions. The Pi 5 draws roughly 5W under load during classification bursts and about 2.5W at idle between triggers. Add a UPS HAT to handle overnight power and prevent SD card corruption from unexpected shutdowns.
In winter or heavily shaded locations, solar alone may not keep up. Larger panels (40W+) or periodic battery swaps extend deployment duration. The agent should monitor battery voltage through a UPS HAT's I2C interface and reduce capture frequency or pause non-essential tasks when power drops below a threshold.
Weatherproofing:
IP65-rated enclosures protect the Pi and electronics from rain, dust, and humidity. Route cables through sealed glands. The camera window should be flush-mounted clear glass or acrylic, angled slightly downward so rain beads roll off instead of pooling. Anti-fog inserts prevent condensation during temperature swings between day and night.
SD card longevity:
Continuous image capture wears out microSD cards. High-endurance cards like Samsung PRO Endurance or SanDisk MAX Endurance are rated for tens of thousands of hours of write operations. Even so, keep the local image cache small by syncing to cloud storage frequently and deleting local copies after confirmed upload. An external USB SSD eliminates the SD card write bottleneck entirely for intensive deployments.
Model accuracy over time:
Your classification model was trained on a specific set of species. Seasonal changes bring different animals through the area. Migrating species, juveniles with different markings, and winter coats can all reduce accuracy. Review the low-confidence detections periodically and retrain or swap the model if accuracy drops consistently. Keeping a "review queue" folder of uncertain detections helps you build training data for model improvements.
Remote monitoring:
If the trap has internet access, the agent can push status updates: battery level, storage usage, detection count, last successful upload timestamp. A simple approach is writing a status JSON file to the Fastio workspace on a schedule. Check it from your phone to confirm the trap is running without visiting the site.
Scaling to multiple traps:
Once one trap works reliably, deploying additional units follows the same setup. Each Pi runs its own OpenClaw agent and uploads to a shared cloud workspace with per-location folders. Standardize the hardware configuration and agent setup so each unit is interchangeable. If one Pi fails, swap it with a fresh one running the same image and configuration.
Citizen science contributions:
Structured sighting data from camera traps has real scientific value. Projects like Wildlife Insights (run by Conservation Technology) and iNaturalist accept community observations. The labeled, timestamped data your agent produces maps directly to the formats these platforms expect. Automating submissions from your sighting log turns a personal camera trap into a contribution to large-scale wildlife population monitoring.
Frequently Asked Questions
How do you build a Raspberry Pi wildlife camera trap?
Mount a Raspberry Pi with a Camera Module 3 and an HC-SR501 PIR sensor in a weatherproof enclosure. Install OpenClaw as the agent framework to coordinate motion detection, image capture, and species classification. The PIR sensor detects animals up to 7 meters away, triggers the camera, and the agent runs a TensorFlow Lite model to identify species before logging and uploading the results.
Can OpenClaw run image classification on Raspberry Pi?
OpenClaw itself is an agent framework, not a classification engine. It orchestrates the pipeline by triggering image capture, calling a separate TensorFlow Lite or ONNX classification model, evaluating the results, and deciding what to log or discard. The Pi 5 handles both OpenClaw's agent loop and a lightweight classifier like MobileNetV2 without bottlenecks.
What is the best camera for Raspberry Pi wildlife monitoring?
The Raspberry Pi Camera Module 3 is the best option. It has a 12-megapixel Sony IMX708 sensor with phase-detection autofocus that keeps subjects sharp from 5 cm to infinity. The NoIR variant paired with IR LEDs captures usable images in complete darkness. The standard 66-degree field of view works well for trail and feeding station monitoring.
How far can a PIR sensor detect animals?
The HC-SR501 PIR sensor has an adjustable detection range from 3 to 7 meters with a 110-degree detection angle. It works by sensing changes in infrared radiation from warm-bodied animals. Larger animals like deer are detectable at the full 7-meter range, while smaller animals like rabbits may need to be closer. Sensitivity is adjustable via a potentiometer on the sensor board.
Does weather affect wildlife camera trap accuracy?
Yes. Rain, fog, and low light reduce image quality and classification confidence. The Camera Module 3's HDR mode helps in high-contrast conditions. Heavy rain triggers false PIR detections from temperature fluctuations. Adjust PIR sensitivity, add a rain shield over the sensor, and use the NoIR camera variant with IR LEDs for reliable low-light capture.
How much storage does a wildlife camera trap need?
A 12-megapixel JPEG image is roughly 3 to 5 MB. At 50 to 200 confirmed captures per day (after false positive filtering), that is 150 MB to 1 GB daily. A 64 GB microSD card holds several weeks of images locally. Syncing to cloud storage like Fastio (generous storage) offloads the archive and prevents the local card from filling up.
Related Resources

Give Your Camera Trap a Cloud Archive
Fastio provides 50 GB of free cloud storage with built-in AI indexing. Upload wildlife sightings from your OpenClaw agent, search your archive by species or date, and share results with researchers, all with no credit card required. Built for openclaw raspberry wildlife camera trap agent workflows.